一、主界面中对象使用说明
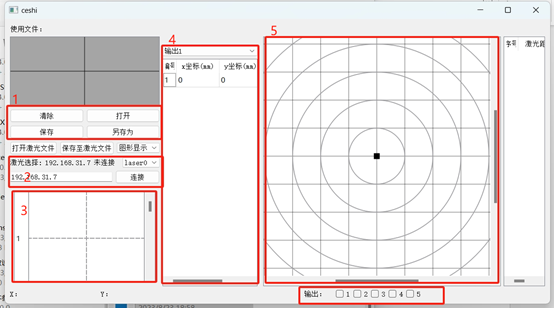
1、对打开的激光文件做对应的清除、打开、保存、另存为的操作。
2、与AGV的IP进行连接,可在输入框中输入对应AGV的IP地址,然后点击连接后,选择AGV上对应的防撞激光雷达,对其进行范围设置。
3、显示对应的激光通道,有60个。
4、可选择对应激光雷达的五个减速等级,对应进行调整、下方的XY坐标即为激光范围的区域点位。
5、显示激光辐射到的范围,显示等级防撞区域,下方是对应的等级防撞区域是否触发。
二、使用说明
1、设置区域范围前,需注意几项:
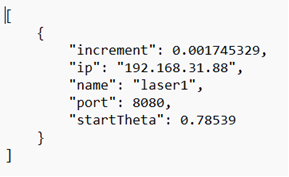
①、检查雷达是否设置正确
(通讯方式:TCP模式、ip:192.168.31.xx、角度:0.1°)
(注意区分name、ip)
②、添加雷达
在控制器中的User–parameter—xingsongDriver.json添加此雷达
③、设置完这几项重启,再开始设置区域
2、设置区域范围操作步骤
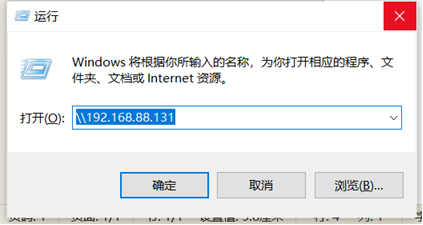
①、进入车体文件夹
使用windows+R键,然后输入\\+车体ip进入控制器内部,账号为 “ego”,密码为 “ego123”
②、打开激光范围设置.exe
进入tools文件夹,打开“激光范围设置.exe”
3.软件操作
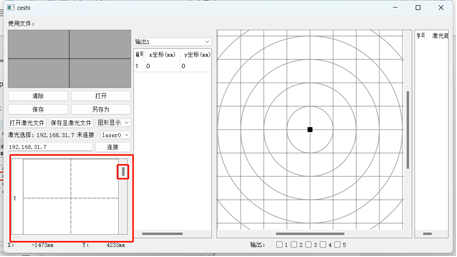
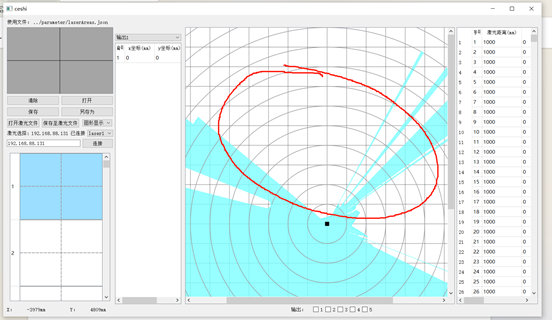
输入车体ip,点击连接,再点击打开激光文件
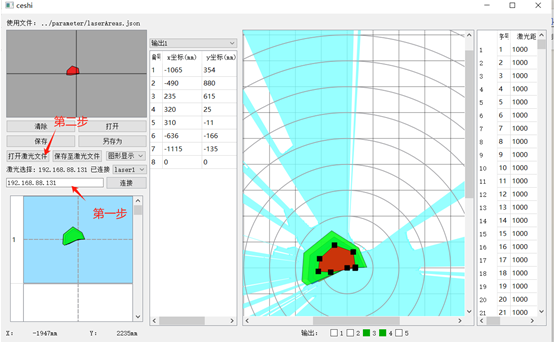
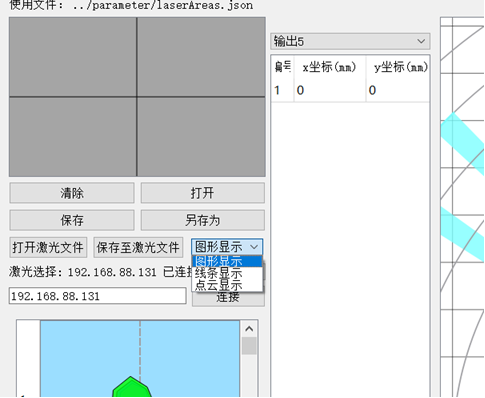
点击此处可以更改激光的显示方式
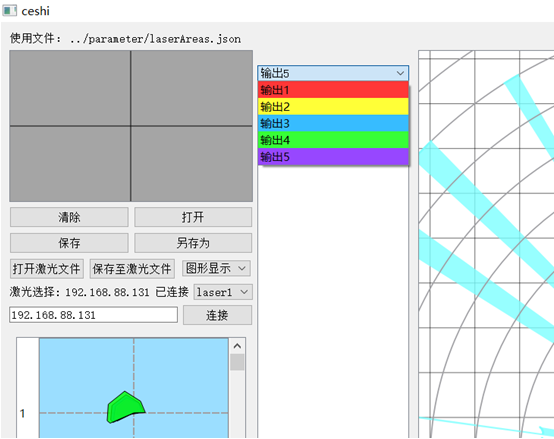
输出1为最高级减速范围,以此递减
如何设置
1. 判断laser1和laser2分别是哪个激光
拿可移动的障碍物,如小木箱等,挡住激光头,观察哪一个有明显变动,laser1和laser2的设置方式都是一样的
2. 首先设置1级减速和5级减速
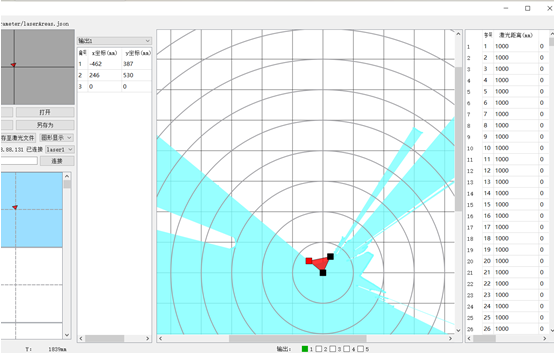
(1)如图,此处已用小木箱靠近激光头(可根据现场情况作相应调整)。鼠标左键拖住图中小黑框,可拉出多个方块,多个小方块组成的范围即为一个区域,当AGV识别到该区域有障碍物时,会触发1级减速(AGV的1级减速效果是停下来),并且下方的“输出”字样会亮起
(2)设置5级减速
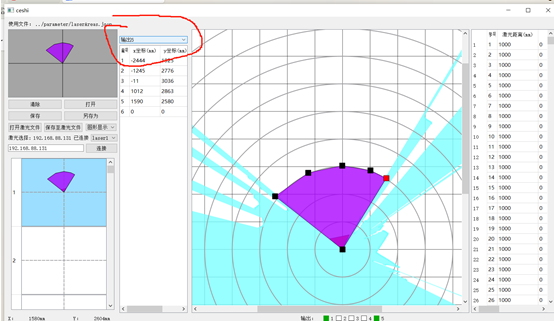
将方框处调整为“输出5”,并按需求设置好区域,同理,如果该区域有障碍物,下方的“输出5”也会亮起,并且触发5级减速
(3)设置2、3、4级减速
2、3、4级减速设置方式与1级和5级同理,根据现场不同情况可作不同调整,设置好大致范围即可,可点击“输出”下方的x坐标,y坐标进行精确调整
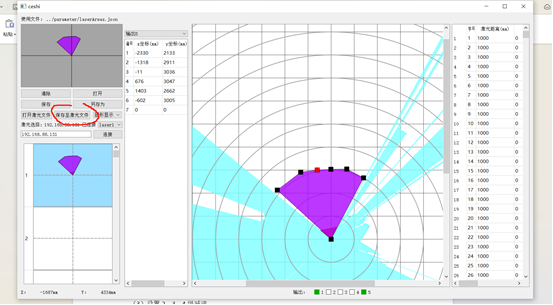
点击此处“保存至激光文件”即可,重启生效。
三、切换激光通道
1、查看车体代码中有无切换激光通道代码
使用windows+R键,然后输入\\+车体ip进入控制器内部,账号为“ego”,密码为“ego123
进入script文件夹中的base文件夹,查看有无!![]
2、如何切换激光通道
打开TableInfo.exe ,找到加载配置à叉车参数3399文件夹à事件相关. json
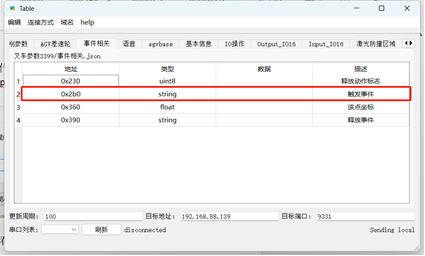
在0×2b0的地址中输入 lasetChannel_x ,即可切换到对应的激光通道,x是第几个激光通道,共有059个激光通道可切换,在设置激光范围的软件中的左下角处,可以设置对应通道的激光范围(即可在编辑软件上使用,动作触发设置验证效果)