建图只需要一次,每次机器人进入了新的环境现场后,只需要扫描一次运行的环境,建立定位系统
通过web登录
首先保证电脑跟控制器的网络通顺,然后打开电脑web游览器登录
http://192.168.31.7:9999/
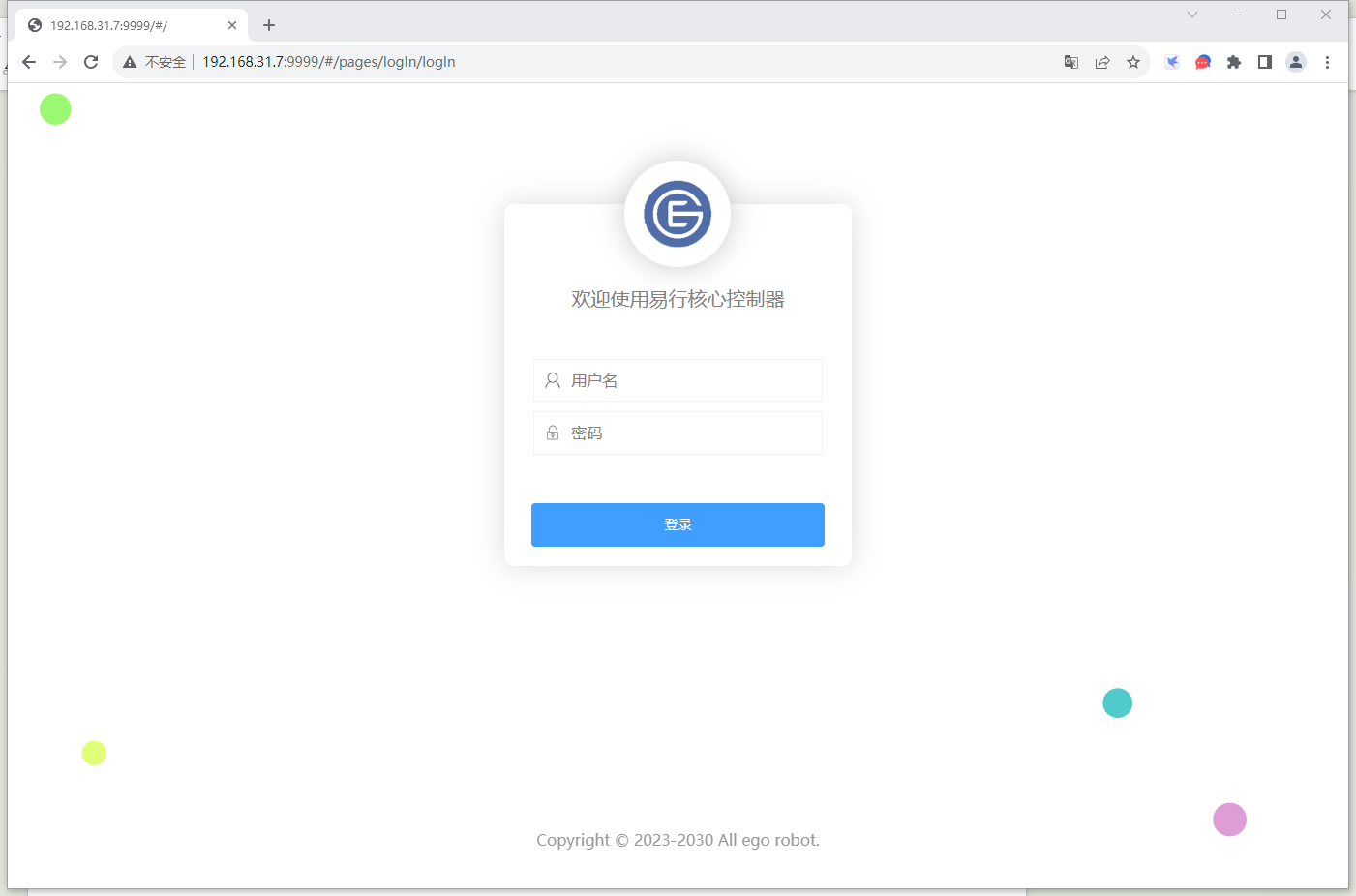
登录进页面后

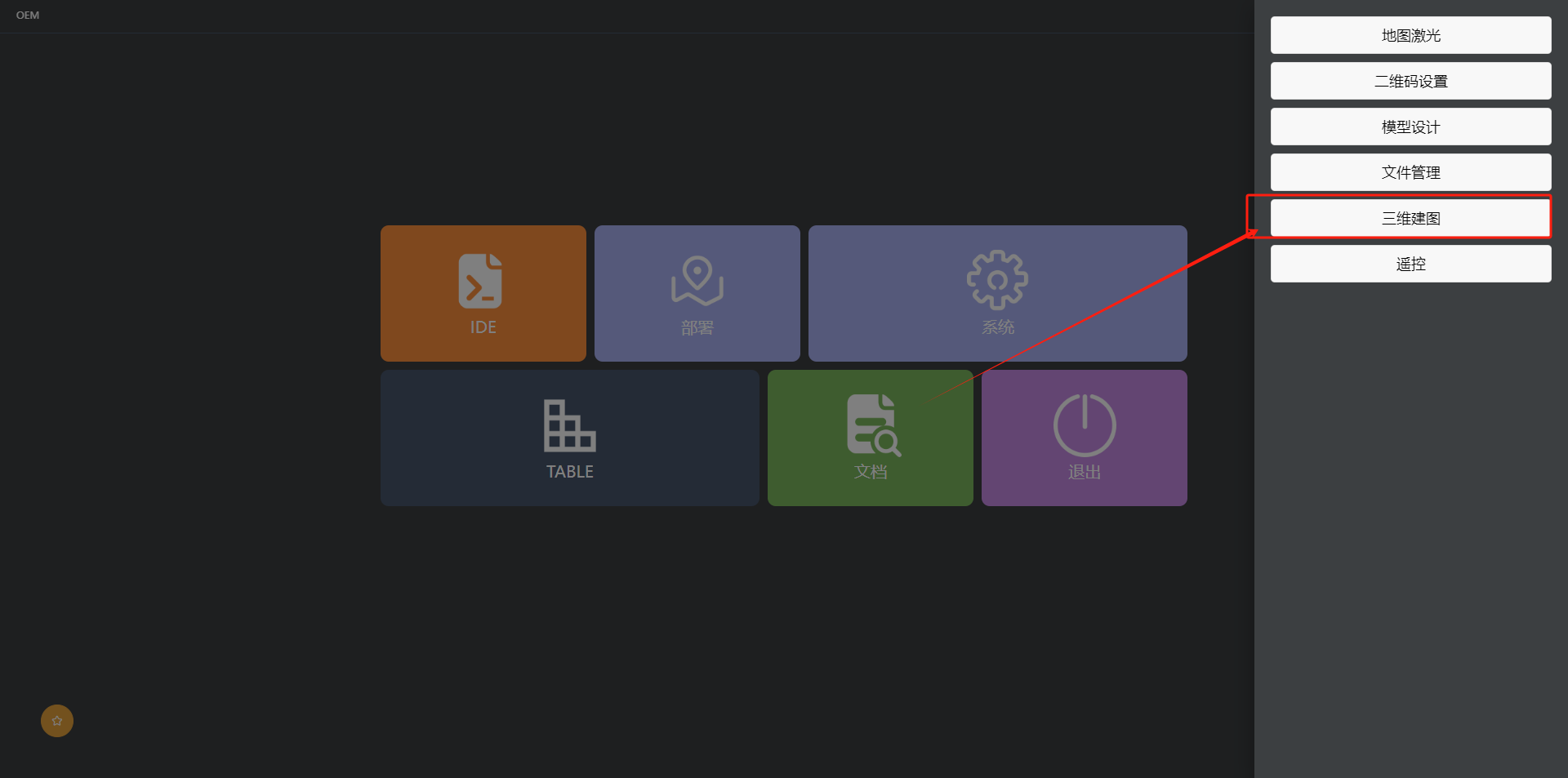
点击部署,进入三维建图界面
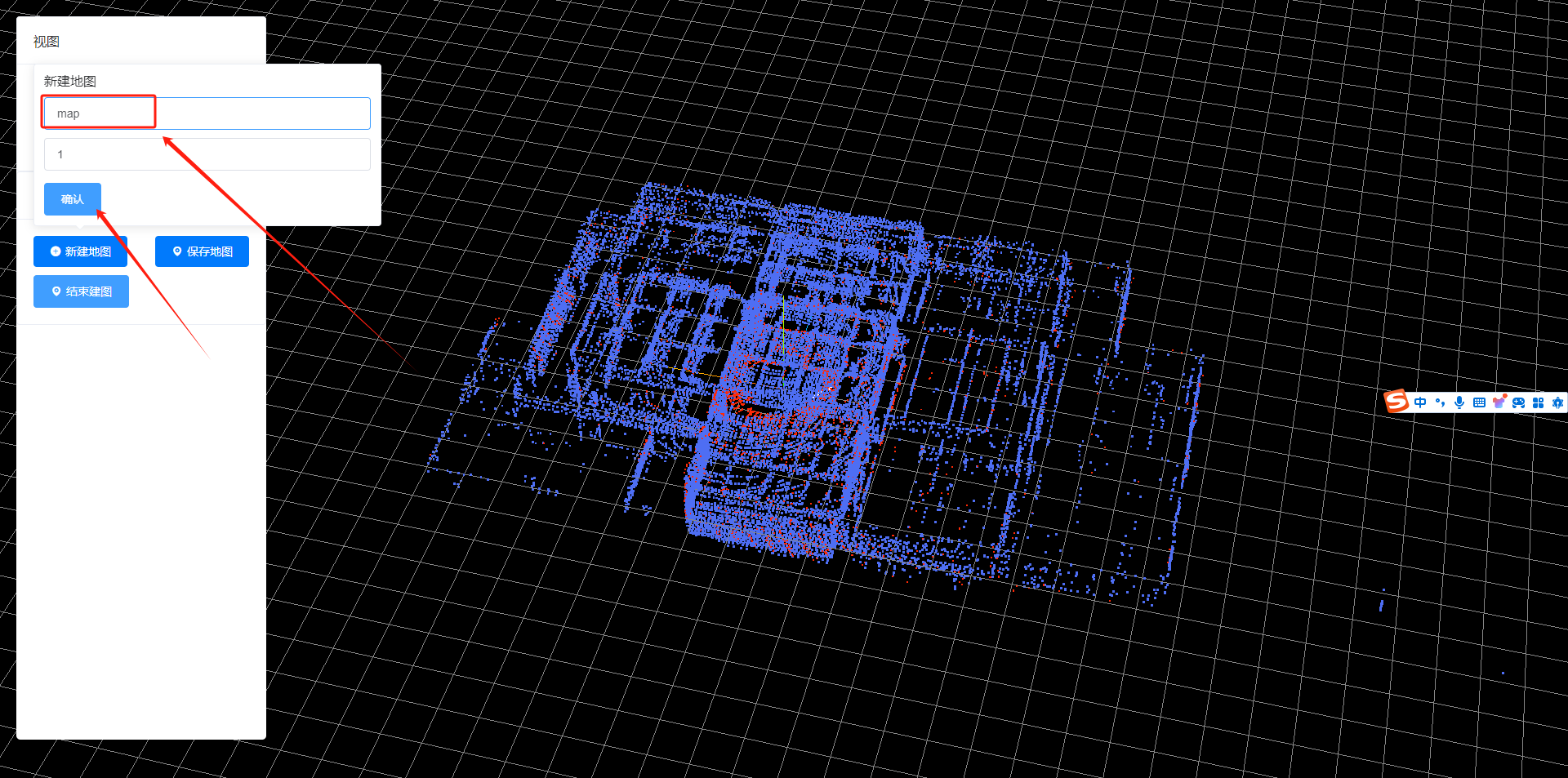
点击开始建图,将开始进入到建图模式
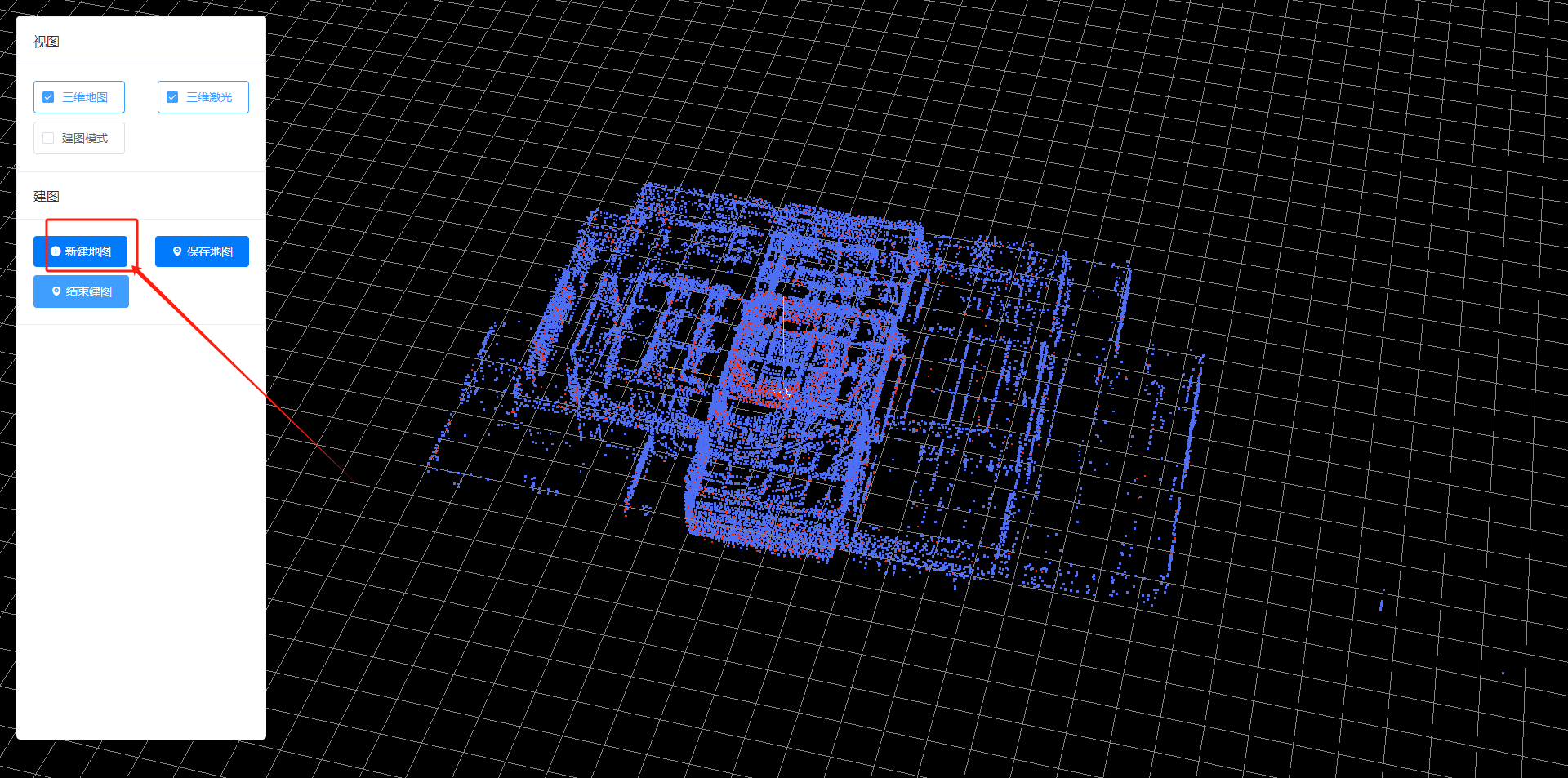
设置好当前建图的地图名称后,留意建图标志是否开始进入了建图状态。正常需要等待几秒
移动机器人扫描环境一周后,点击保存地图

退出建图模式。现在可以退出三维界面了

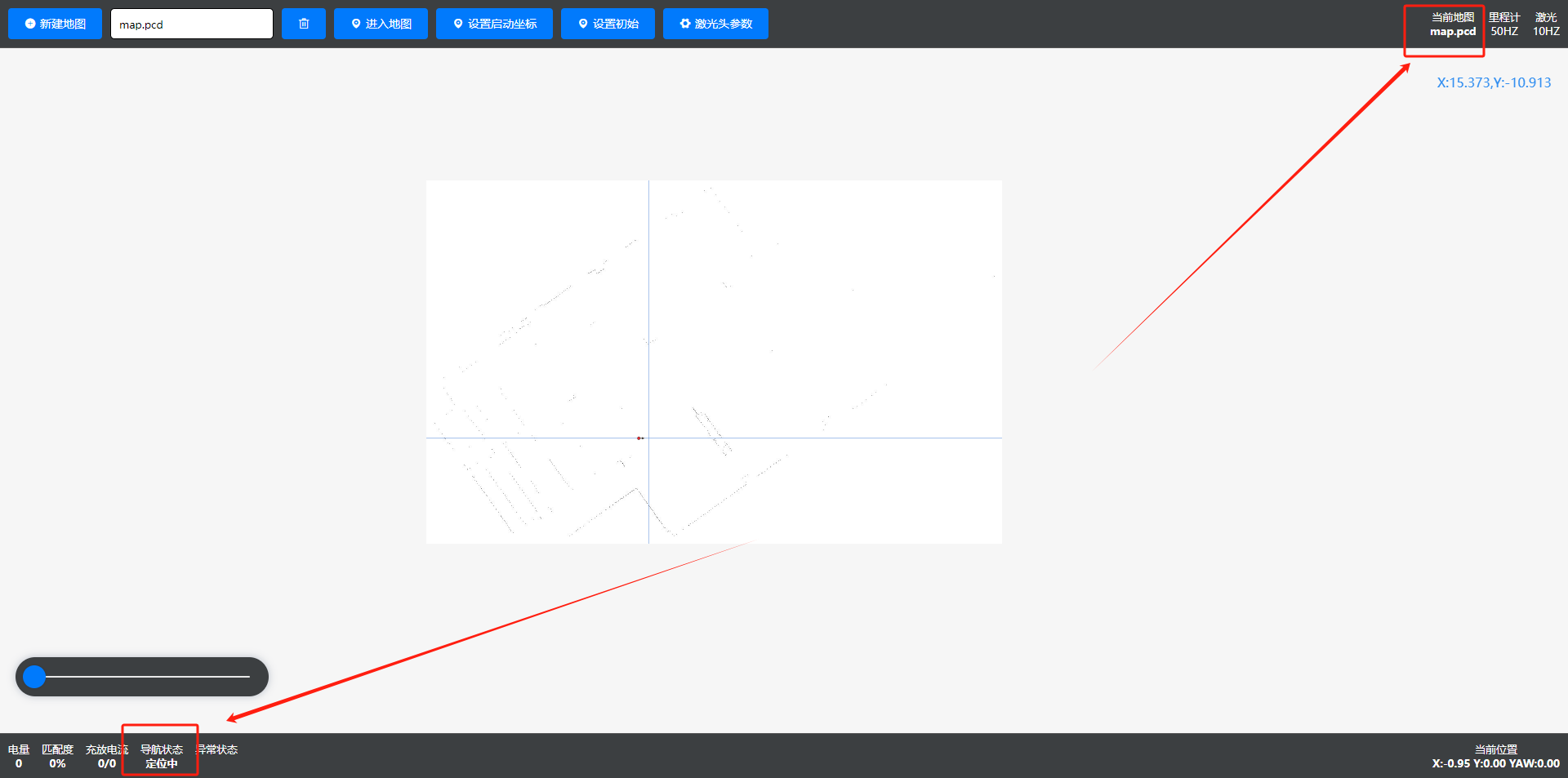
进入到激光地图界面,使用刚才的地图作定位

选择好刚才建图的三维地图名称。后缀后pcd的是三维地图后缀

选择后地图后,切换到该地图定位
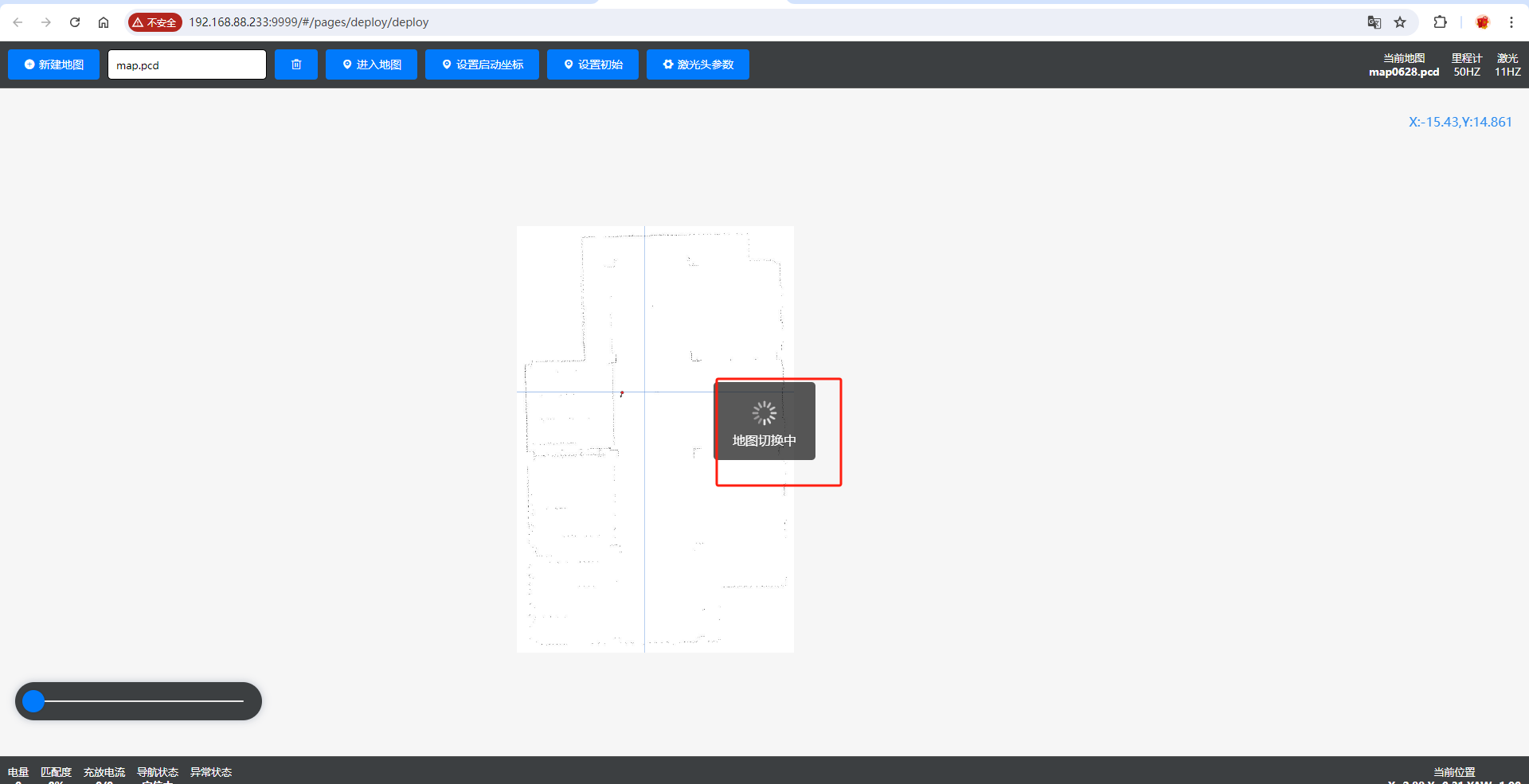
定位成功后,左上角会显示当前定位的地图名称