深圳易行机器人技术论坛
正在加载…
请使用更现代的浏览器并启用 JavaScript 以获得最佳浏览体验。
加载论坛时出错,请强制刷新页面重试。
磁条巡线的代码调整
ego
通过web进入到控制器开发环境
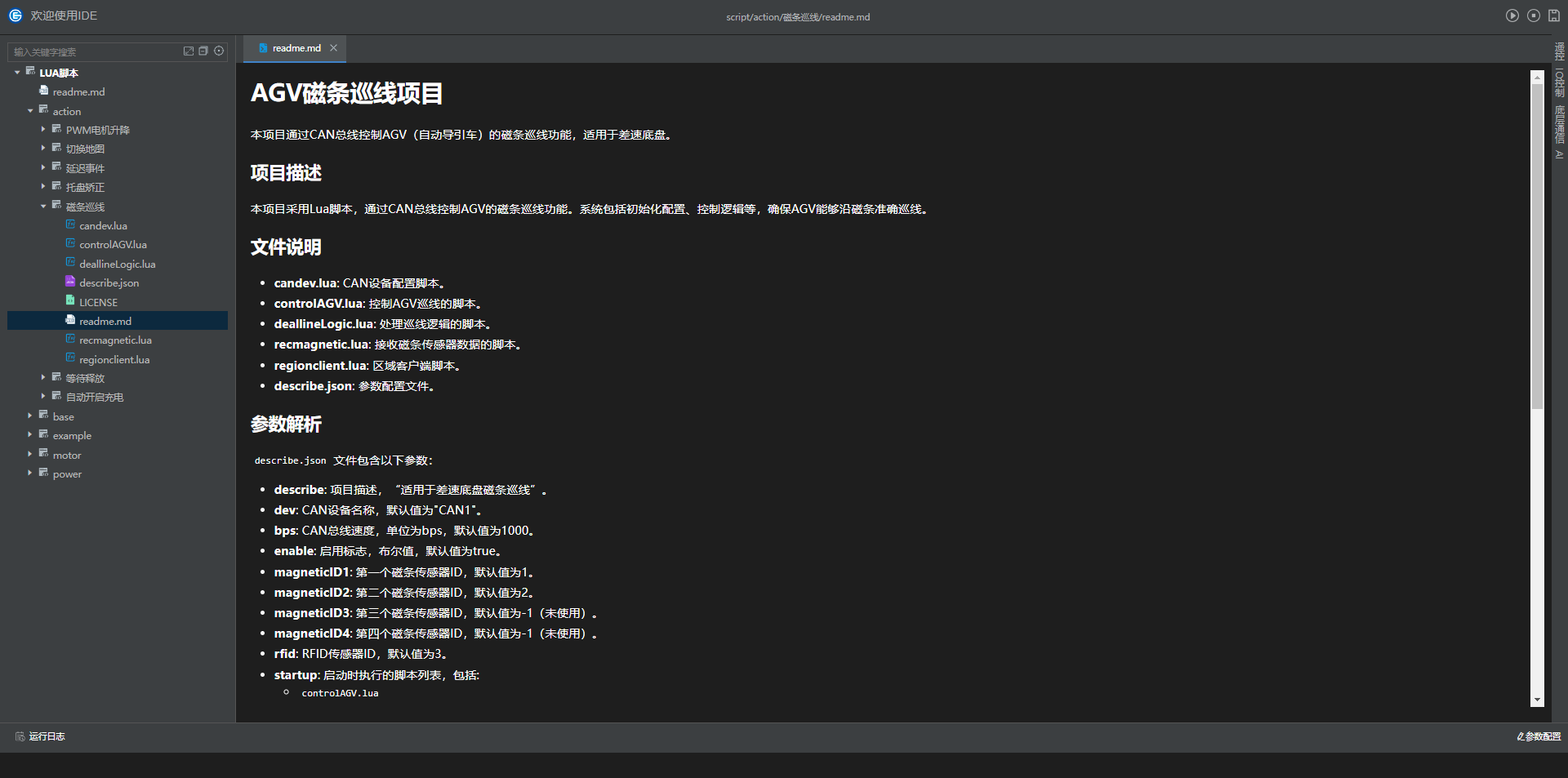
找到action中的磁条巡线项目
打开代码的readme.md文件,读取代码的调试流程
Copyright © 2024 易行机器人 All Rights Reserved 粤ICP备2022062569号