传感器安装位置说明文档
1. 引言
在机器人系统中,传感器的正确安装和布局是确保系统正常运行和实现最佳性能的关键。本文档详细描述了传感器在机器人上的安装位置、其对应的坐标信息(x, y, theta)以及这些位置的意义,帮助用户更好地理解和使用这些传感器。
2. 坐标系统概述
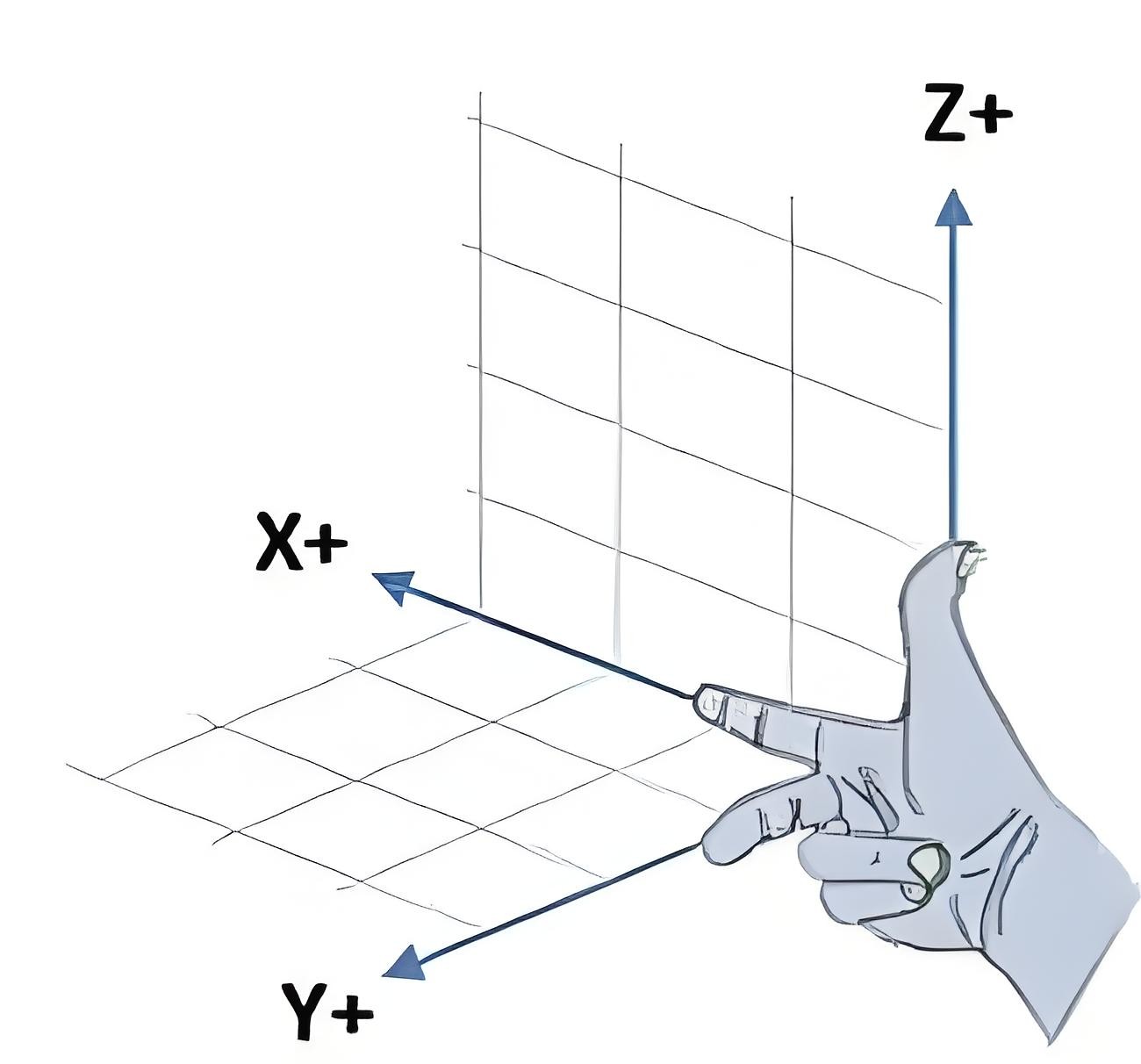
机器人通常使用右手坐标系来定义传感器的位置:
- x 轴:从机器人中心向前延伸的方向。
- y 轴:从机器人中心向左延伸的方向。
- theta (θ):机器人的偏航角(yaw),逆时针旋转为正角度。
3. 机器人中心点解析
3.1 差速轮机器人
- 中心点位置:通常位于两驱动轮的中点。
- 描述:差速轮机器人通过调节两侧轮子的速度差来实现转向,中心点是机器人旋转的轴心。
3.2 单舵轮机器人(叉车模型)
- 中心点位置:通常位于后面叉臂两个从动轮之间的中点。
- 描述:单舵轮机器人依靠一个舵轮进行转向,中心点是驱动和转向的参考点。
3.3 双舵轮机器人
- 中心点位置:通常位于两舵轮之间的中点。
- 描述:双舵轮机器人使用两个独立的舵轮进行转向,中心点是控制和运动的核心位置。
4. 坐标意义解析
4.1 x 轴位置
- 定义:从机器人中心向前延伸的方向。
- 意义:正x值表示传感器位于机器人前方,负x值表示传感器位于机器人后方。
4.2 y 轴位置
- 定义:从机器人中心向左延伸的方向。
- 意义:正y值表示传感器位于机器人左侧,负y值表示传感器位于机器人右侧。
4.3 theta (θ) 角度
- 定义:传感器相对于机器人初始方向的旋转角度。
- 意义:正theta值表示传感器逆时针旋转,负theta值表示传感器顺时针旋转。
5. 安装注意事项
- 固定传感器:确保传感器牢固安装,避免在运行过程中松动或移位。
- 角度调整:根据实际需要调整传感器的角度,确保其覆盖预期的检测区域。
- 线缆管理:合理布置传感器的连接线,避免干扰机器人的其他部件或传感器。
6. 结论
本文档详细描述了传感器在机器人上的安装位置及其对应的坐标信息。理解这些信息对于正确安装传感器并确保机器人系统的正常运行至关重要。希望本说明文档能帮助用户更好地理解和使用传感器,提升机器人系统的性能。