通过web登录
首先保证电脑跟控制器的网络通顺,然后打开电脑web游览器登录
http://192.168.31.7:9999/
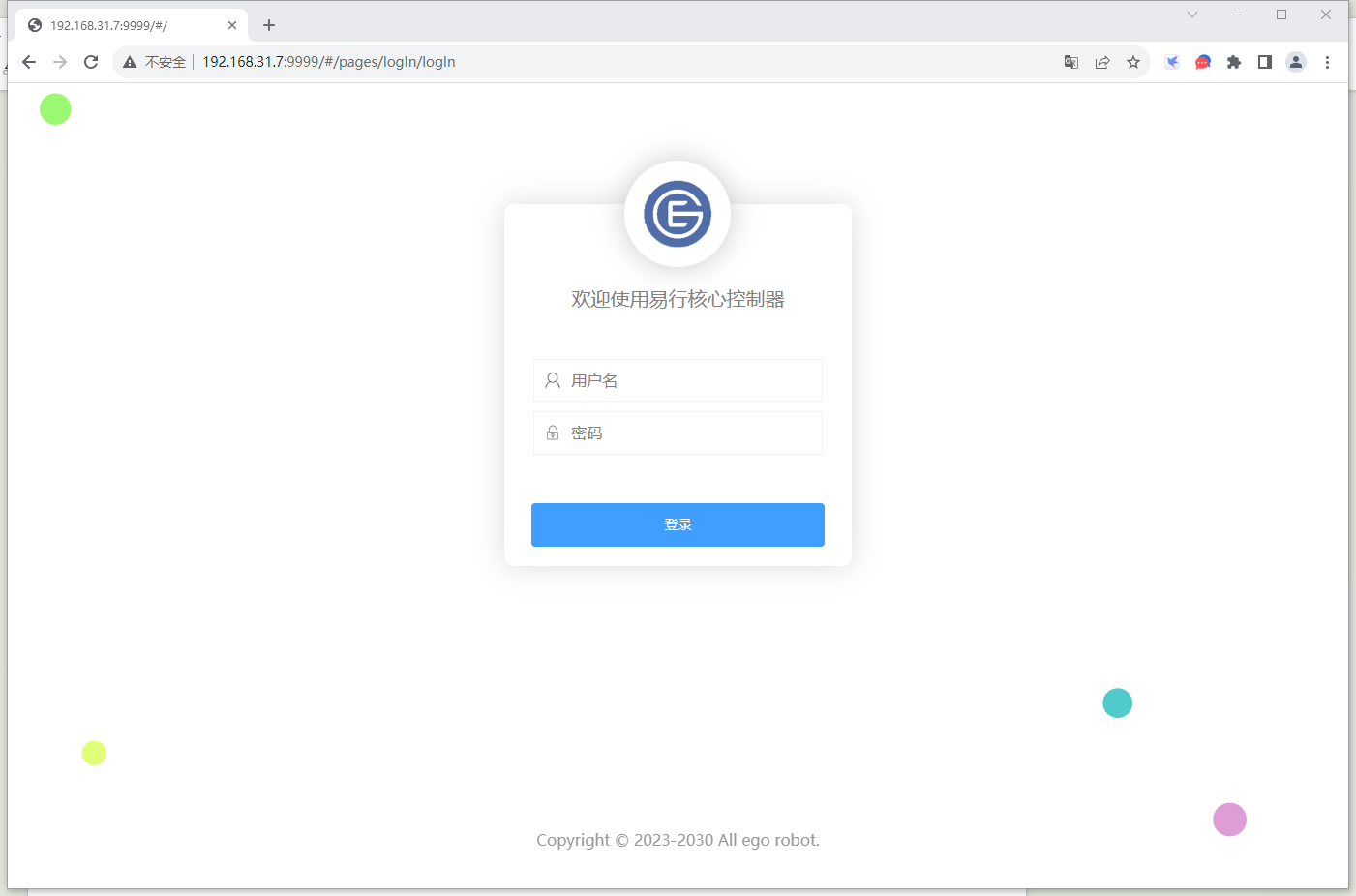
登录进页面后

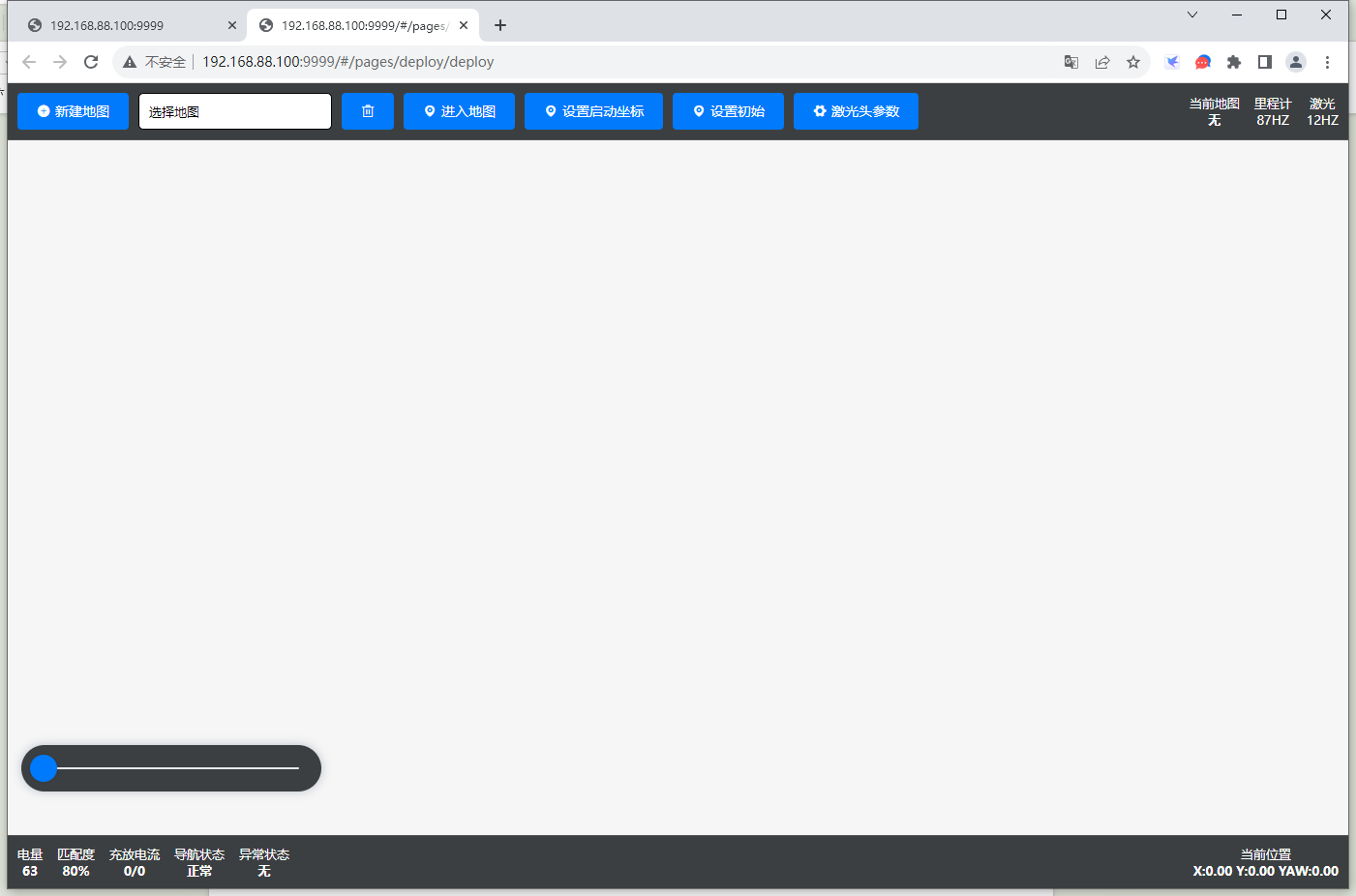
点击部署,进入地图构建页面
如果没有设置好参数,先点击激光头参数设置,设置好激光头类型和激光头在机器人的位置
注意:激光头IP一般设置为192.168.31.19
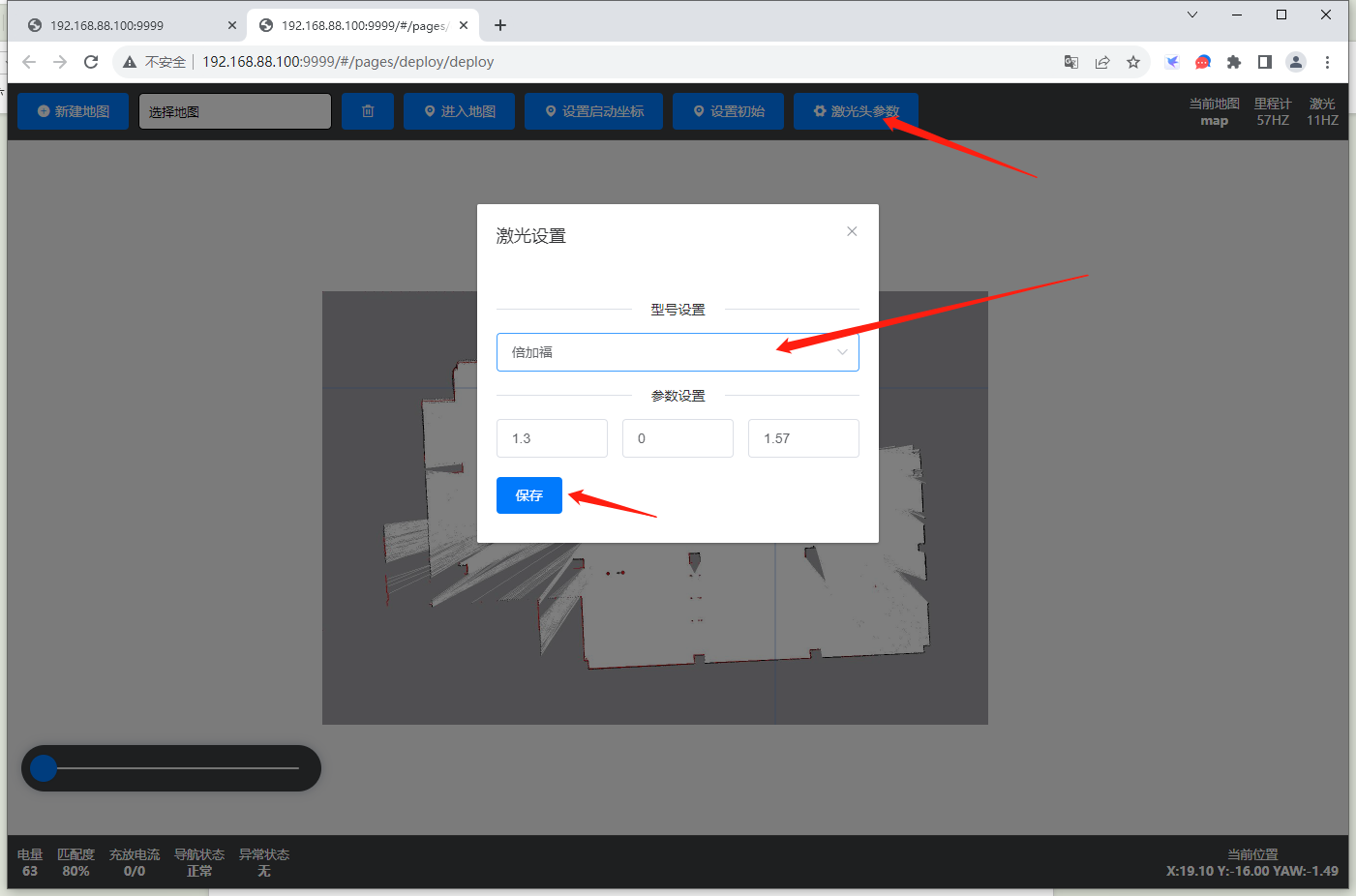
点击保存后,开始构建地图
点击新建地图,输入新建的地图名,点确定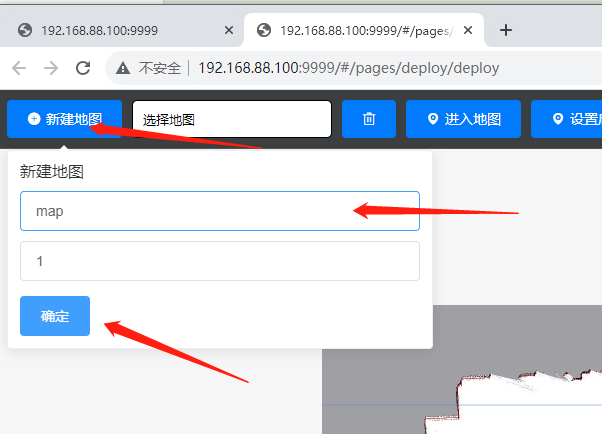
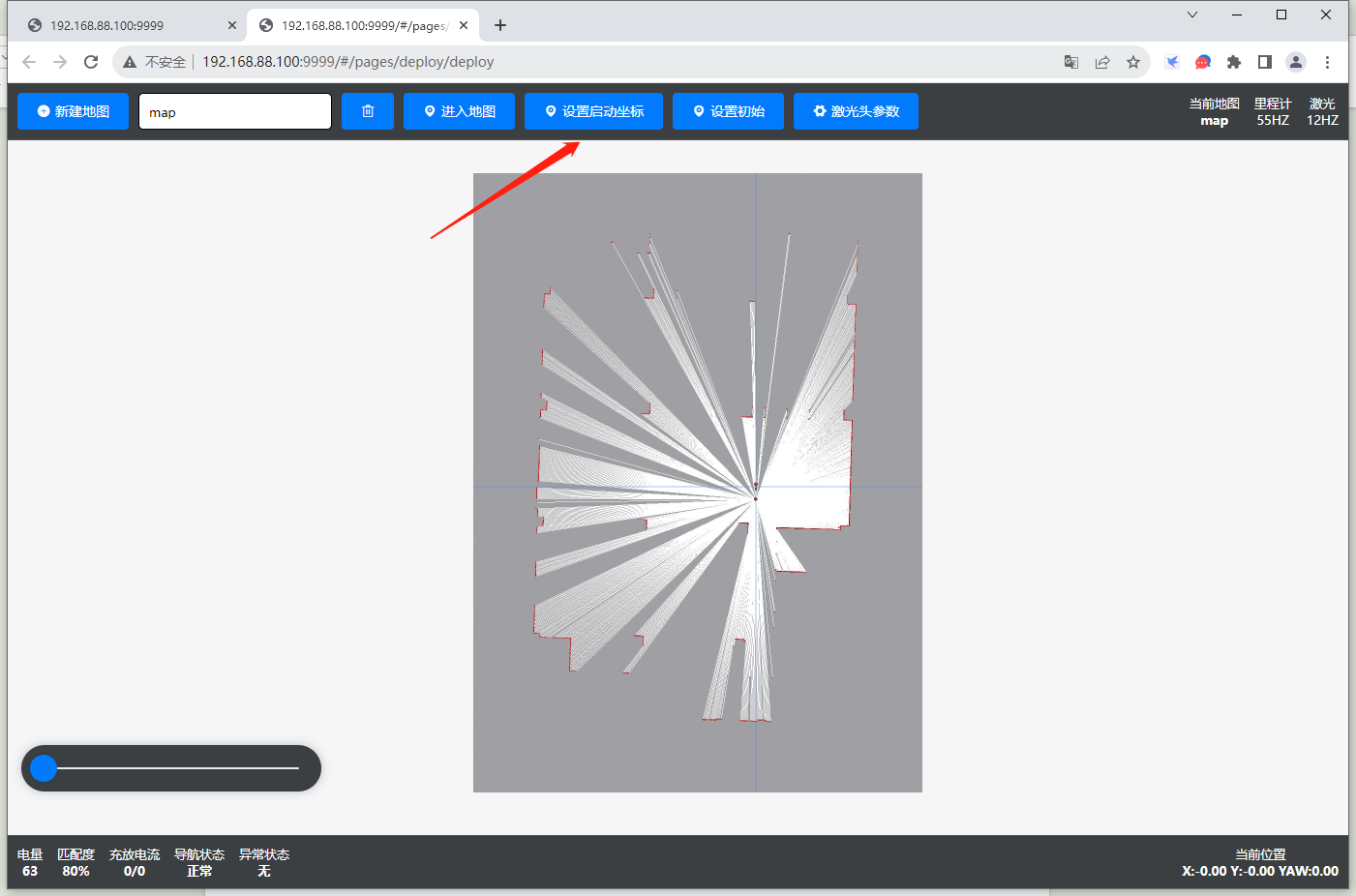
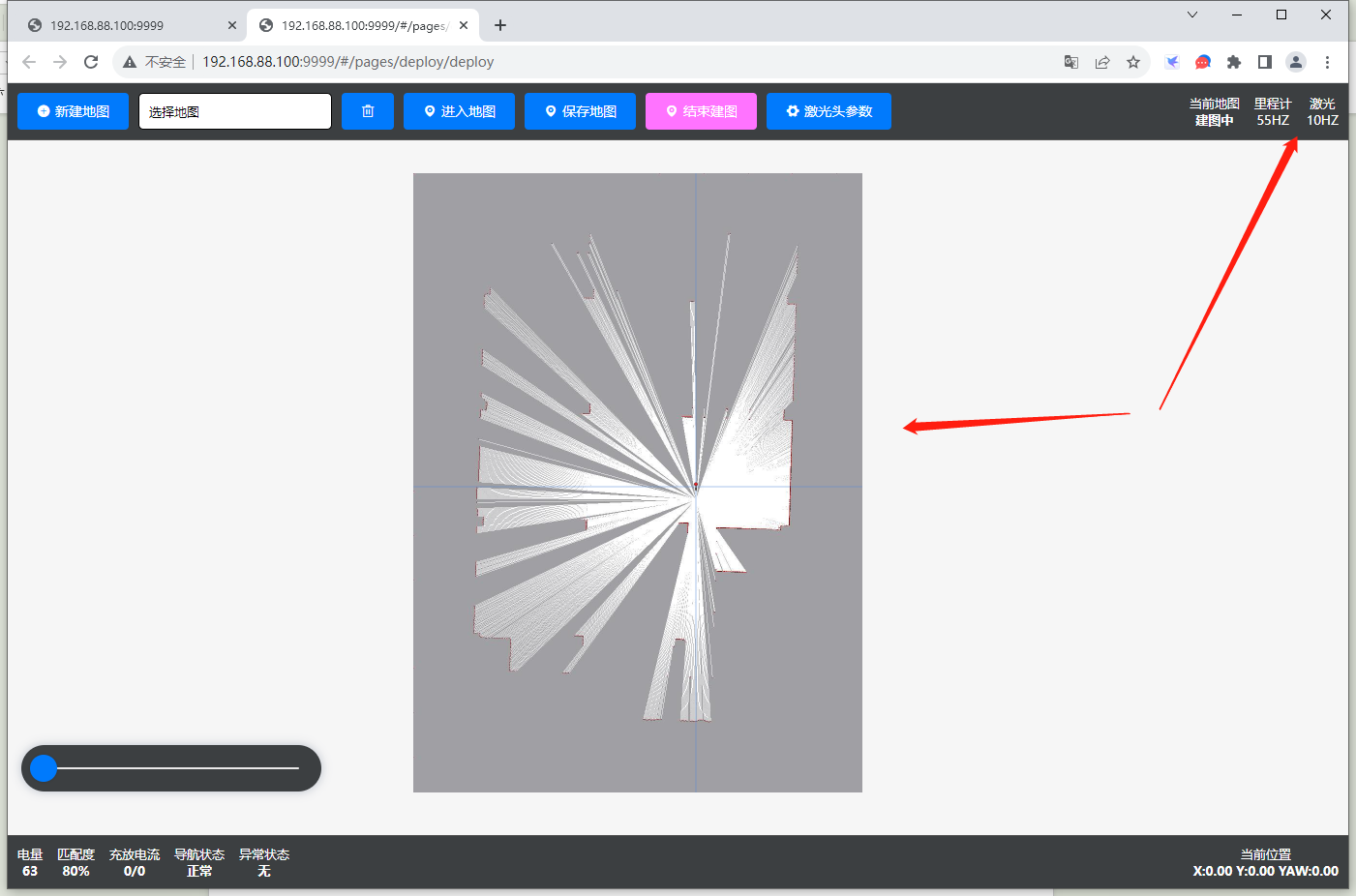
开始建图后,地图会出现在网页中心位置,然后手动遥控AGV对现场地图进行扫描
注意,右上角为里程计和激光接受的频率,如果没有频率出现,则无法构建地图。
检查AGV里程计数据和激光头数据
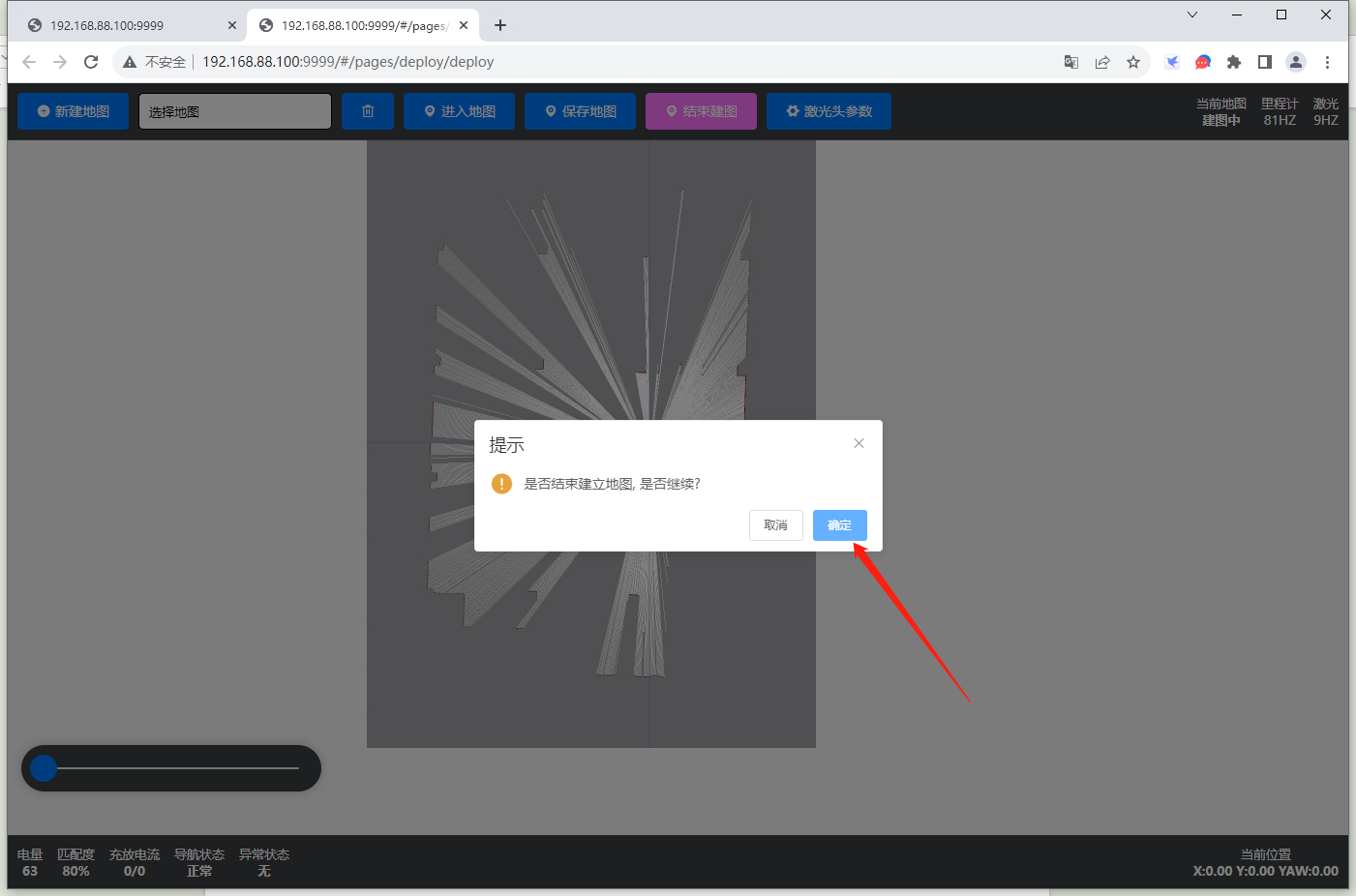
建图完成后,点击保存地图。如果不需要再进行构建地图,则点击结束建图,退出建图状态

进入激光导航
左上角选择好你构建完成的地图,然后点击进入地图。
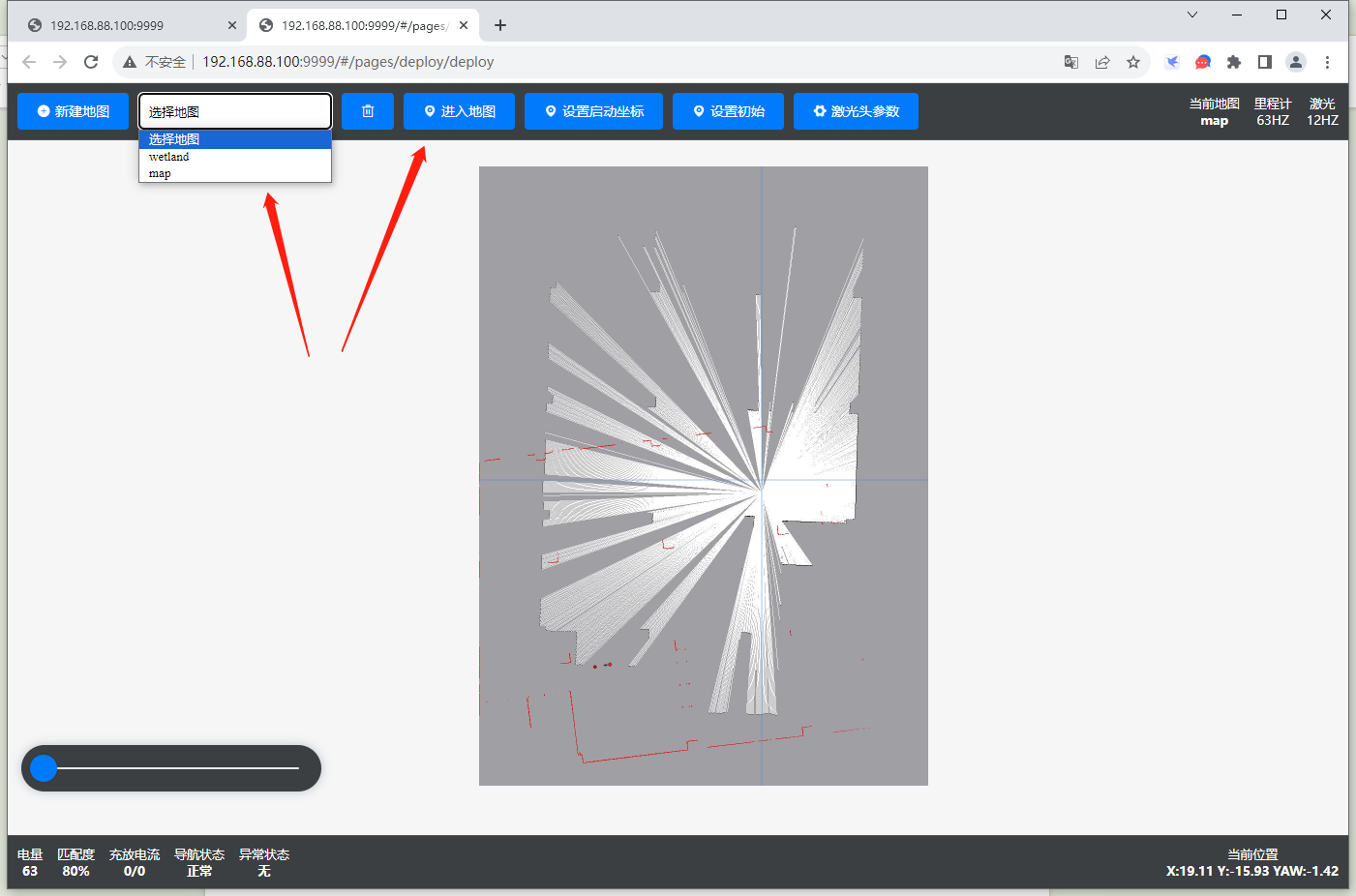
点击设置初始坐标,可以设置AGV当前的位置,当AGV的位置跟激光重合,则匹配正确
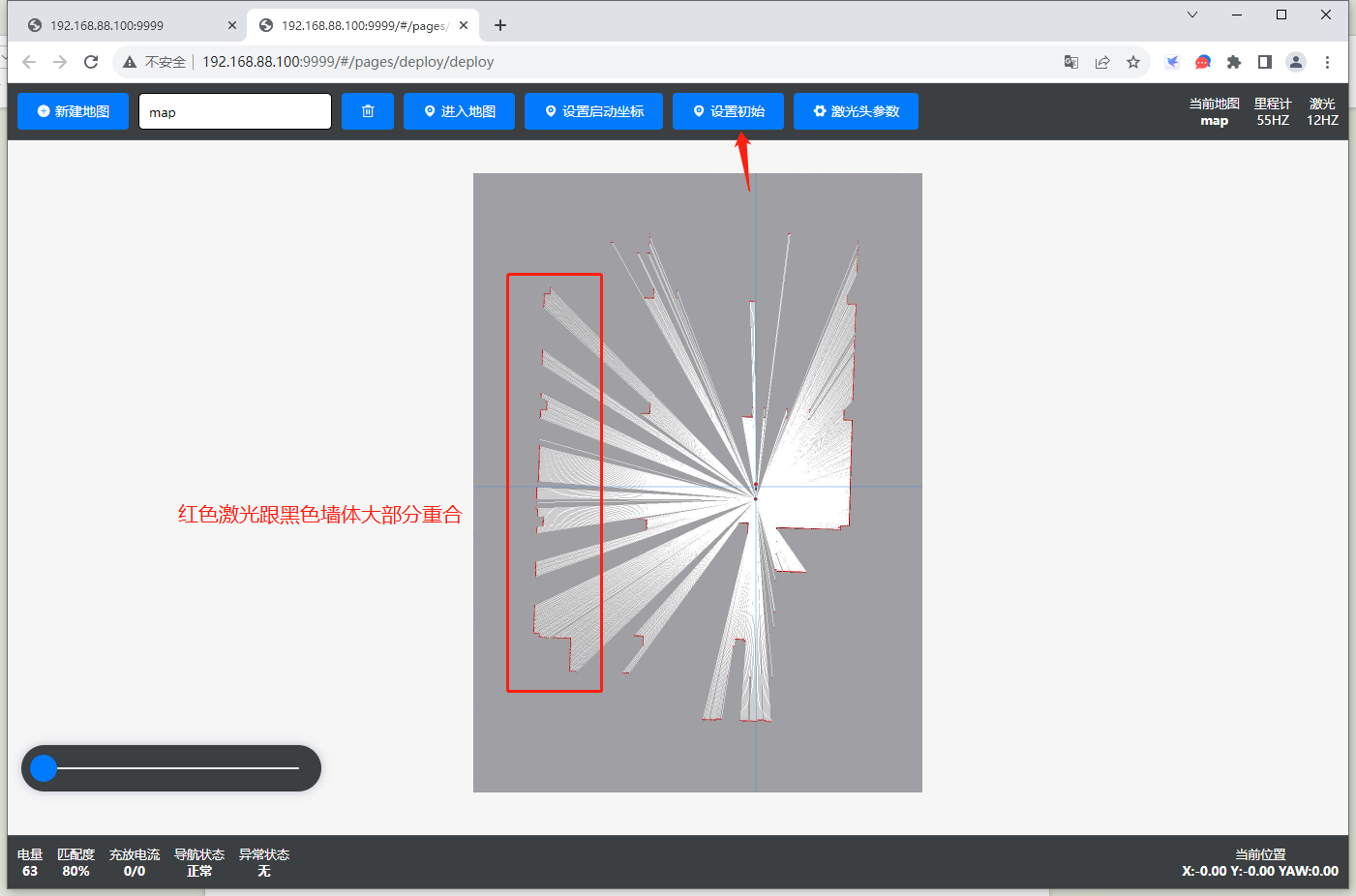
点击 设置启动坐标 后,当agv重启后,自动从该坐标启动。一般用于AGV初始点