SLAM二维码混合定位设置文档
本文档详细介绍如何通过二维码设置AGV(自动导引车)的定位模式。该流程确保在SLAM定位与二维码坐标一致时,AGV能自动切换到二维码模式,从而提高导航精度和稳定性。
—
前提条件
- SLAM系统校准完毕:确保AGV的SLAM系统经过充分校准,并且传感器数据准确。
- 二维码绝对坐标已知:二维码在全局坐标系中的绝对坐标需事先测量并确认。
- 编辑软件连接正常:确认编辑软件与AGV系统的通讯正常,便于发送坐标信息和配置操作。
—
操作步骤
1. 确保SLAM定位匹配准确
- 校准SLAM系统
- 对比环境地图与实际环境,确保误差控制在允许范围内。
—
2. 根据二维码绝对坐标设置二维码坐标
获取二维码数据
- 根据事先测量得到的二维码绝对坐标数据,核实坐标的数值、单位及方向。
配置二维码参数
- 在编辑软件中,输入二维码的绝对坐标。
- 注意核对坐标系的方向,避免因方向不一致导致定位偏差。
—
3. 进行二维码绑定操作
将AGV推到二维码上方
- 小心将AGV推至二维码正上方,确保AGV的传感器能清晰识别二维码。
按照图示顺序点击绑定
保存二维码设置
- 绑定完成后,点击保存按钮以存储二维码坐标及绑定信息。
- 可参照下图中编辑软件的设置界面:
—
4. 自动切换至二维码模式
发送坐标信息
- 通过编辑软件向AGV发送坐标,确保发送的坐标与二维码上配置的SLAM坐标一致,坐标范围在+-5cm内都认为是二维码点位。
自动切换机制
- 当系统检测到发送坐标与二维码配置的SLAM坐标完全匹配时,AGV将自动从SLAM导航模式切换到二维码导航模式。
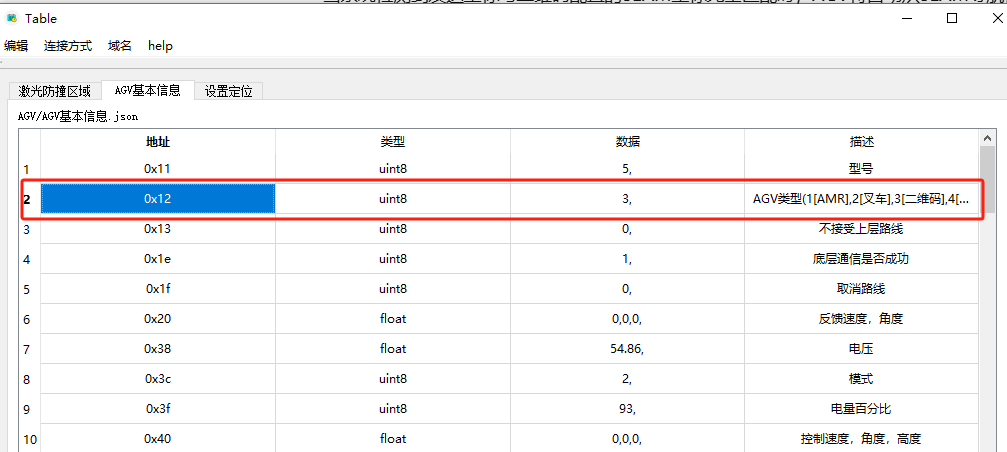
验证切换效果
- 观察AGV在接收匹配坐标后的行为,agv运动到对应的点位时,如果切换到二维码模式,在table上面有所体现。
—
注意事项
- 设备状态:在操作前,请确保AGV、SLAM系统及二维码读取设备均处于正常工作状态。
- 环境干扰:二维码区域应保持无障碍物,以免影响二维码的扫描识别。
- 数据准确性:在输入二维码坐标时,务必确认数值、单位和方向均正确无误。
—
通过以上步骤,AGV将能在SLAM定位与二维码坐标一致时自动切换到二维码模式,从而提高导航的稳定性和精度。如在操作过程中遇到问题,请及时联系技术支持。

