AGV动作触发器详细说明
动作触发器用于定义AGV(自动导引车)在运行过程中需要执行的一系列动作。通过预设的「命令字」和触发条件,使AGV在特定的场景中自动运行对应的动作流程。
—
📌 一、动作触发器的基本概念
命令字(Command):
- 命令字代表AGV要执行的一系列动作。例如,当系统发送
Pickup命令时,AGV将执行事先定义好的Pickup动作流程。
触发器(Trigger):
- 根据命令字设定具体动作的条件,定义AGV在特定位置或路线下执行哪些动作。
- 触发器分为:单点触发、两点触发、路线触发和区域触发等类型。
—
📌 二、单点触发(Single Point Trigger)
单点触发是AGV到达特定单个点时自动执行设定好的动作。
例如:
设置了2号点在到达时AGV升降到0.5米,那么当AGV经过2号点时,升降机构自动调整到0.5米高度。


单点触发的属性类型:
| 属性类型 | 触发条件 | 使用说明 |
|---|
| 起点触发(StartPoint) | 该点作为路线的起点才触发(已弃用) | ⚠️ 已弃用,不推荐使用 |
| 终点触发(EndPoint) | 该点作为路线的终点才触发 | 常用于卸货、停靠 |
| 任意点触发(AnyWhere) | AGV只要经过该点就触发 | 适合任意经过动作 |
—
📌 三、两点触发(Two Points Trigger)
两点触发表示AGV经过两个指定点(起点和终点)时,会在其中某个点执行预设动作。
例如:
设置AGV从1号点到2号点的过程中,在1号点执行升降到0.3米的动作。


两点触发的触发模式:
- 起始触发(First Trigger):
- 结束触发(End Trigger):
—
📌 四、路线触发(Route Trigger)
路线触发是一种复杂的触发方式。为避免大量编写单点或两点触发器,可以直接在AGV行驶路线中定义多个点的动作,形成完整的动作链。
例如:
当目标点为3号点时,AGV会按如下流程执行:
- 1号点升降到0.0米
- 2号点升降到0.1米
- 3号点升降到0.2米

相对指定方式(推荐):
相对指定可以解决多条路线通往同一目标点时动作触发的需求:
b0:终点b1:终点前的第一个点b2:终点前的第二个点,以此类推……
例如目标为3号点,路线可为:
- 路线A:
1 -> 2 -> 3
- 路线B:
5 -> 4 -> 3
使用相对指定方式,无论哪条路线,都会按照终点倒推的方式触发对应动作:
| 触发位置 | 动作 |
|---|
| b2(第一个点) | 升降到0.0米 |
| b1(第二个点) | 升降到0.1米 |
| b0(终点) | 升降到0.2米 |

—
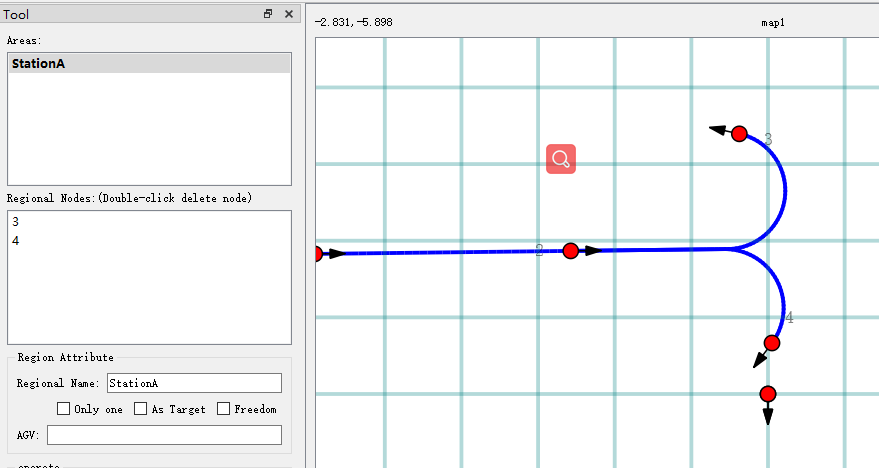
📌 五、区域触发(Area Trigger)
当需要对多个点位统一设置动作时,使用区域触发更便捷高效。
例如:
假设有多个位置(3号点、4号点)属于同一个区域“StationA”,则设置区域触发后,AGV无论到达区域内的哪个点,都执行相同的动作流程。
- 定义区域名称:“StationA”
- 包含点位:3号点、4号点
- 在路线触发中,将终点定义为
area_StationA:
| 触发位置 | 动作 |
|---|
| b2(倒数第二个点) | 升降到0.0米 |
| b1(倒数第一个点) | 升降到0.1米 |
| b0(终点区域) | 升降到0.2米 |
这种方式,无论是路线1->2->3还是1->2->4,都会执行同样动作。
单点触发和两点触发也支持使用区域名:

—
📌 六、触发器优先级规则(重要)
当多个触发器在同一点冲突时,系统按照以下优先级顺序执行:
| 优先级顺序(从低到高) | 触发类型说明 |
|---|
| 路线触发 (Route Trigger) | 优先级最低 |
| 两点触发 (Two Points Trigger) | 中等优先级 |
| 单点触发 (Single Point Trigger) | 优先级最高(绝对动作) |
例如:
若路线触发设定2号点升降0.2米,两点触发设定为0.1米,单点触发设定为0.0米,AGV实际执行的为单点触发的0.0米。
—
⚠️ 总结与注意事项
- 推荐使用「相对指定」与「区域指定」方式,使得路线规划更加灵活高效。
- 设置触发器时注意优先级规则,避免冲突。
- 如触发动作复杂或难以理解,请分步骤进行调试与验证。
若仍存在疑问,请及时与技术支持联系。