配置好驱动器跟电机的适配[具体操作看对应的品牌电机手册]
驱动器和电机准备好后,设置好驱动器的波特率,和驱动器的ID。所有驱动器的波特率需要一致
驱动器的CAN口跟易行控制器的CAN口连接,保证终端电阻60欧姆
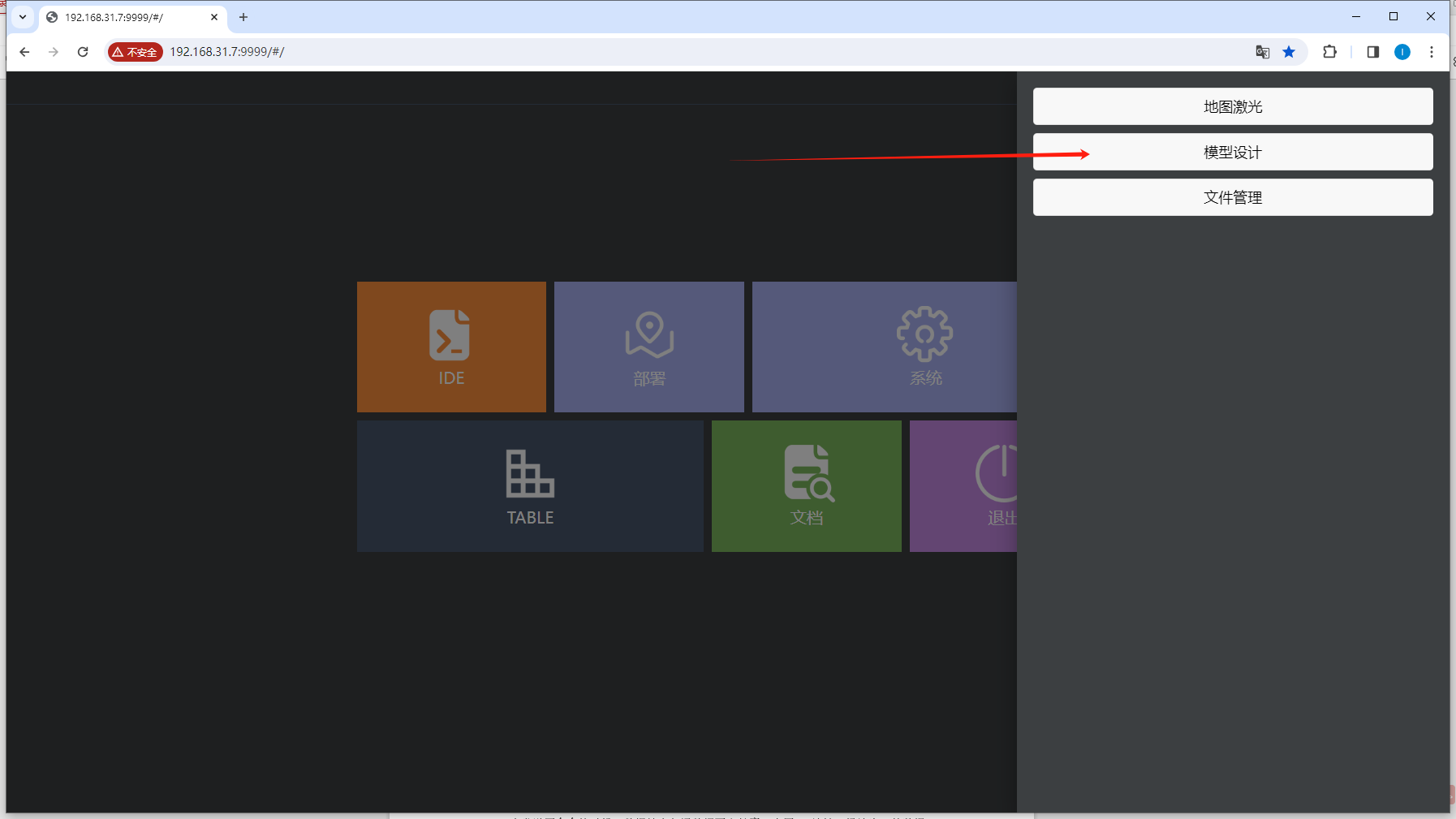
登录控制器网页版,设置好运动模型[差速模型]
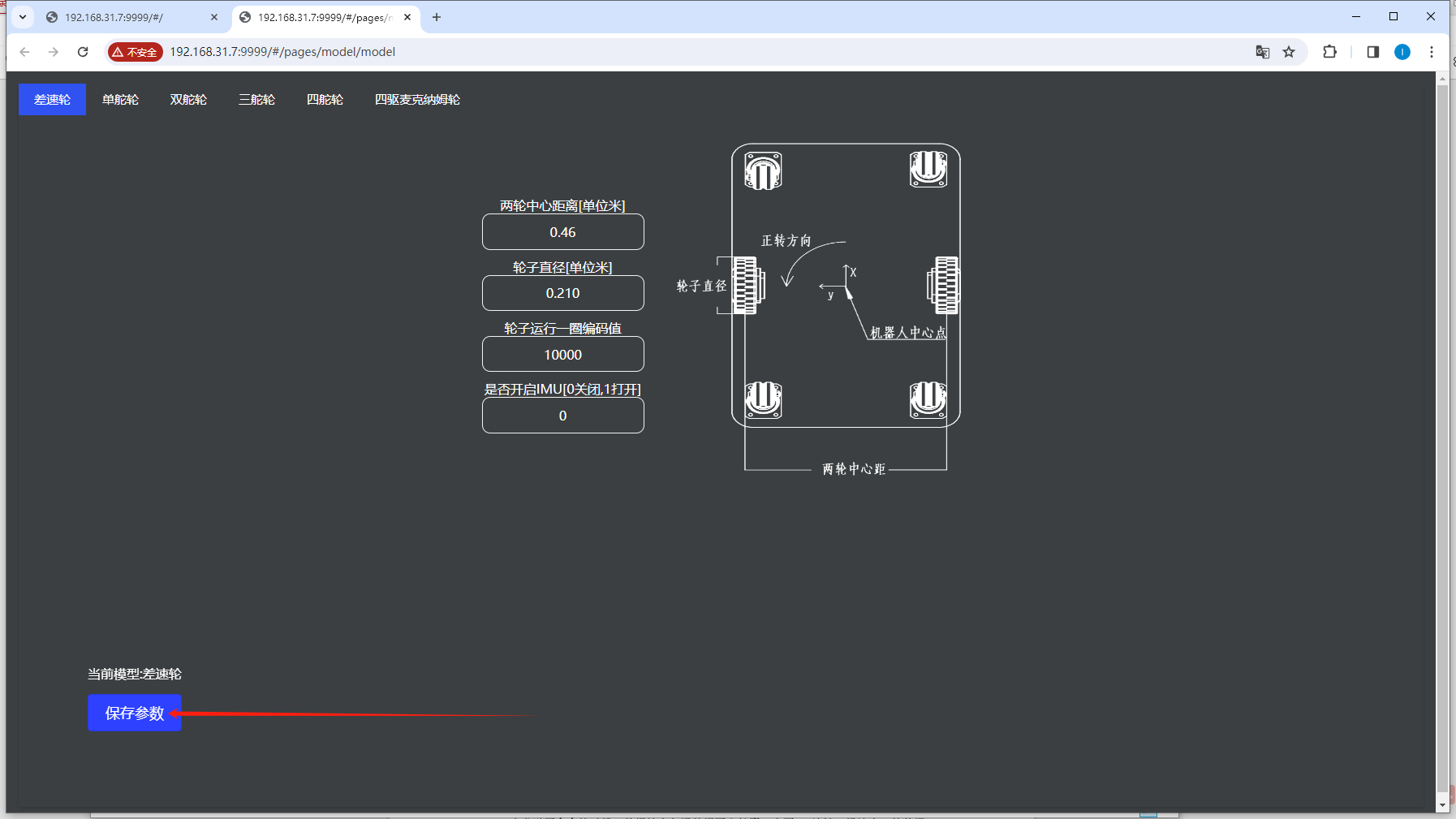
根据实际车体轮距间距等设置好参数
通过网页更新电机脚本固件到控制器
固件更新教程
登录脚本编辑器修改电机的减速比和转速方向等
脚本驱动的讲解
遥控的使用
通过遥控软件尝试控制。
- 如果可以控制,则驱动正常,
- 如果不能控制,检查CAN通信和电机驱动配置
测试里程计的准确性,如果里程计不准确
一般是车体参数或者转速比设置有问题,则需要重新检查参数
差速轮模型测试里程计技巧
- 先测试跑直线是否准确,走直线只跟轮子直径和减速比,每转对应编码器有关。
- 直线测试无误后,再测试自旋转的准确性,如果在直线准确的基础上,自旋转只跟两轮中心距这个参数有关